 Process
Analysis Toolkit (PAT) 3.5
Help Process
Analysis Toolkit (PAT) 3.5
Help |
First of all, you can give a name for your model using the
following syntax in the first line of your model. The model name is used
internally as an ID for simulator to find the correct drawing pictures, if any.
It is optional. //@@Model Name@@ A global constant is defined using the following syntax, #define
max 5; #define is a keyword used for multiple purposes.
Here it defines a global constant named max, which has the value 5. The
semi-colon marks the end of the 'sentence'. Note: the constant value can only be integer value (both
positive and negative) and Boolean value (true or false). Constant enumeration can be defined using keyword
enum. For example, enum
{red, blue, green}; is the syntactic sugar for the following: A global variable is defined using the following syntax, var knight = 0; wherevar is a key word for defining a variable and
knight is the variable name. Initially, knight has the value 0.
Semi-colon is used to mark the end of the 'sentence' as above. We remark the
input language of PAT is weakly typed and therefore no typing information is
required when declaring a variable. Cast between incompatible types may result
in a run-time exception. A fixed-size array may be defined as follows, var board = [3, 5,
6, 0, 2, 7, 8, 4, 1];
where board is the array name and its initial value is specified as
the sequence, e.g., board[0] = 3. The following defines an array of size
3. var leader[3]; All elements in the array are initialized to be 0. Note for multi-dimensional array: PAT supports
multi-dimensional arrays by converting them into one dimensional arrays. You can
declare and use multi-dimensional arrays as follows (Note that here, the N
should be a constant). The only restriction is that you can not assign
multi-dimensional array constant to multi-dimensional arrays variables. To
initialize a multi-dimensional array, you need to do it explicitly in some
events. Note: To assign values to specific elements in an array, you can use event
prefix. For example: P() = a { matrix[1][9] = 0 } -> Skip; Variable range specification: users can provide the range of
the variables/arrays explicitly by giving lower bound or upper bound or both. In
this way, the model checkers and simulator can report the out-of-range violation
of the variable values to help users to monitor the variable values. The syntax
of specifying range values are demonstrated as follows. Array Initialization: To ease the modeling, PAT supports
fast array initialization using following syntax. In the above syntax, 1(2) and 7(N*2) allow user to quickly create an array
with same initial values. 3..6 and 12..10 allow user to write quick increasing
and decreasing loop to initialize the array. User defined type: To ease the modeling, PAT allows users to
define any
data structures and use them in PAT models. The following shows the
syntax. Hidden variable: To simplify the model, PAT introduces the
hidden variables which can be used as normal variables. The only difference is
that hidden variable is a kind of secondary variable, which is not included in
the state details. The idea of secondary is to use redundant variable to make
the modeling easier. Note: It is user's responsibility to make sure that hidden
variables don't introduce any new states. If you not sure about this, you can
change hvar to var to see any difference in terms of states in the simulation or
verification. In PAT, process may communicate through message passing on channels. A
channel is declared as follows, channel c 5; wherechannel is a key word for declaring channels only,
c is the channel name and 5 is the channel buffer size; Channel buffer
size must be greater or equal to 0. Notice that a channel with buffer size 0
sends/receives messages synchronously. This is used to model pair-wise
synchronization, which involves two parties. Barrier-synchronization, which
involves multiple parties, is supported by following CSP's approach, i.e., alphabetized
parallel composition. Note: Currently, channel array is also supported.
channel c[4] 5; In addition, the key word #define may be used to define macro.
For instance, #define goal x == 0; where goal is the name of the macro and x == 0 is what goal
means. A macro name is used in the same way as global constant is used. For
instance, given the above definition, we may write the following, if (goal) { P } else { Q }; which means if the value of x is 0 then do P else do Q.
We remark that macro can be used in LTL formulae. Furthermore, macro can take in parameters as defined below. When calling the
macro, the keyword call is used. The
macro expression can be any possible expression in PAT (if, local variable
declarition, while, assignment). #define multi(i,j) i*j; System = if (call(multi, 3,4) >12 ) { a -> Skip } else { b ->
Skip }; Note that following usage of macro definitions are allowed in PAT, which
means that macro definitions can be a fragment of code to be used in the
model. Model Inclusion
var y =
0;
var z = 0;
#define reset(i) {x = i; y = i};
Q = e2{z = 2; call(reset,
1)} -> Skip;
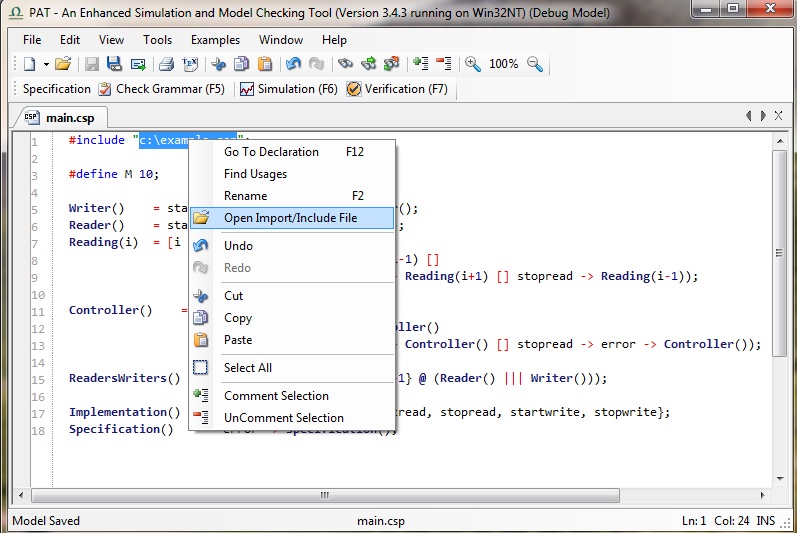
If the model is too big, you can split the model to several files and include them in the main model by using the include keyword. For example,
#include "c:\example.csp";
If the model is in the same folder of the main model, you can only put the file name. Note that: Nested inclusion in files are also possible in PAT, and duplicated inclusion will be ignored.
To open the included file, you can select the file path, then right click the button and choose "open import/include file" function to open it. This funcation can recognize both absolute path and relative path to the current model file. The picture below shows how to open an included file.
Copyright © 2007-2012 Semantic Engineering Pte. Ltd.